6.7.3. הוכחת נכונות בעזרת SAT – Unbounded Model Checkingנרצה כעת להציג שיטת להוכחת נכונות
באמצעות SAT. נציג שוב דוגמא לבדיקת הכנה: נוסחה לתיאור מסלול ללא מעגלים:
נשתמש ב-2 נוסחאות לצורך בדיקת המודל:
אם הנוסחה ספיקה נסיק שיש שגיאה – קיים
מסלול שבו יש מצב המספק אם הנוסחה איננה ספיקה – כל מסלול באורך
המצב המעניין עבור האלגוריתם להוכחת נכונות באמצעות SAT:
הרעיון מאחור האלגוריתם הוא הצעדים הבאים:
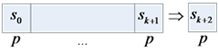
כאשר הוכחנו את אלה, ניתן להזיז את נקודת המבט ונקבל כי:
אין תגובות!
|
תוכן העניינים:
קישורים רלוונטיים:שיתוף: |
- שפות תיכנות

- בניית אתרים
- אבטחת מידע ו-IT
- Web Securityאנונימיות, פרטיות וחוק ברשת האינטרנטקריפטוגרפיההנדסה לאחור (reversing)אבטחת ססמאותאבטחת מידע - כלליטרוינים ווירוסיםאבטחת Windows
- מגזין Digital Whisper:Digital Whisper - גליונות מלאיםDigital Whisper - הגליון הראשוןDigital Whisper - הגליון השניDigital Whisper - הגליון השלישיDigital Whisper - הגליון הרביעיDigital Whisper - הגליון החמישיDigital Whisper - הגליון השישיDigital Whisper - הגליון השביעיDigital Whisper - הגליון השמיניDigital Whisper - הגליון התשיעיDigital Whisper - הגליון העשיריDigital Whisper - הגיליון האחד עשרDigital Whisper - הגיליון השנים עשרDigital Whisper - הגיליון השלושה עשרDigital Whisper - הגיליון הארבעה עשרDigital Whisper - הגיליון החמישה עשרDigital Whisper - הגיליון השישה עשרDigital Whisper - הגיליון השבעה עשרDigital Whisper - הגיליון השמונה עשרDigital Whisper - הגיליון התשעה עשרDigital Whisper - הגיליון העשריםDigital Whisper - הגיליון העשרים ואחדDigital Whisper - הגיליון העשרים ושנייםDigital Whisper - הגיליון העשרים ושלושהDigital Whisper - הגיליון העשרים וארבעהDigital Whisper - הגיליון העשרים וחמישהDigital Whisper - הגיליון העשרים ושישהDigital Whisper - הגיליון העשרים ושבעהDigital Whisper - הגיליון העשרים ושמונהDigital Whisper - הגיליון העשרים ותשעהDigital Whisper - הגיליון השלושיםDigital Whisper - הגיליון השלושים ואחדDigital Whisper - הגיליון השלושים ושנייםDigital Whisper - הגיליון השלושים ושלושהDigital Whisper - הגיליון השלושים וארבעה
- מדעי המחשב
- מתמטיקה
- פיסיקה

עמוד הבית
> מדעי המחשב > הנדסת תוכנה > מבוא לאימות תוכנה > הוכחת נכונות בעזרת SAT – Unbounded Model Checking
 כדי להציג את הנושא. לשיטה המוצגת אופי של הוכחה אינדוקטיבית: בסיס וצעד, שלאחריהם
נשלים את האלגוריתם.
כדי להציג את הנושא. לשיטה המוצגת אופי של הוכחה אינדוקטיבית: בסיס וצעד, שלאחריהם
נשלים את האלגוריתם.![plot:\[LoopFree\left(
{{{\bar v}_0},...,{{\bar v}_k}} \right) = \left( {\mathop \wedge \limits_{i = 0}^{k - 1} R\left( {{{\bar
v}_i},{{\bar v}_{i + 1}}} \right)} \right) \wedge \,\,\,\left( {\,\mathop \wedge \limits_{0 \leqslant i < j
\leqslant k} \left( {{{\bar v}_i} \ne {{\bar v}_j}} \right)} \right)\]](/documentResources/326/plot_231.png)

 .
. ממצב התחלתי מכיל רק מצבים המספקים את
ממצב התחלתי מכיל רק מצבים המספקים את 
![plot:\[\varphi
_{step}^k\left( {{{\bar v}_0},...,{{\bar v}_k},{{\bar v}_{k + 1}}} \right) =
\left( {\mathop \wedge \limits_{j = 0}^k
R\left( {{{\bar v}_j},{{\bar v}_{j + 1}}} \right) \wedge p\left( {{{\bar v}_j}}
\right)} \right) \wedge \neg p\left( {{{\bar v}_{k + 1}}} \right) \wedge
\,\,\,\left( {\,\mathop \wedge
\limits_{j = 0}^{k - 1} \left( {{{\bar v}_j} \ne {{\bar v}_k}} \right)}
\right)\]](/documentResources/326/plot_232.png)
![plot:\[\varphi
_{step}^k\]](/documentResources/326/plot_233.png) הוא המצב בו
הוא המצב בו ![plot:\[\varphi _{step}^k\]](/documentResources/326/plot_234.png) איננה ספיקה. כאשר
איננה ספיקה. כאשר ![plot:\[\varphi
_{step}^k\]](/documentResources/326/plot_235.png) איננה ספיקה אז לכל מסלול (לא בהכרח ממצב התחלתי) באורך
איננה ספיקה אז לכל מסלול (לא בהכרח ממצב התחלתי) באורך  , אם כל מצביו
, אם כל מצביו  מספקים את
מספקים את  , אז המצב האחרון
, אז המצב האחרון  מספק
גם הוא את
מספק
גם הוא את  .
. . אם
. אם  ספיקה נחזיר את ההשמה המספקת כדוגמא נגדית (
ספיקה נחזיר את ההשמה המספקת כדוגמא נגדית ( ).
).![plot:\[\varphi
_{step}^k\]](/documentResources/326/plot_236.png) לא ספיקה, נעצור ונחזיר true, כלומר
לא ספיקה, נעצור ונחזיר true, כלומר  .
. ונחזור לשלב 1.
ונחזור לשלב 1.
 ושל
ושל 




